编者按:本发明在于完善了自动扶梯和自动人行道功能及作用;另一方面以人工智能方法,解决与确保乘客等人员在乘梯过程中不同工况下,防止或化解人身安全事故及设备损伤等事件地发生。因本发明通过5G等通讯软件自动联入电梯物联网远程监控终端,既方便各级管理人员监管,又能第一时间得到救援人员或维修人员的响应及处理,使其工作量大大降低。而关键一点在于当扶梯安全问题得到智能化处理或解决时,网联进入电梯远程安全生态监控平台将成为必然。
一、 问题地提出
扶梯附加制动器要求设置在城市轨道、火车站、 机场、公交车站等人流量密集场所使用的公共交通型自动扶梯上,是高负荷运载设备一个十分重要的安全部件。其主要作用在工作制动器失效、扶梯逆转、超速的紧急情况下(特别是高负荷下)能够动作,起到减速制停扶梯的作用。它是扼守自动扶梯或自动人行道失控下溜的最后一道“关卡”。
制动器是自动扶梯的一个重要部件,当主制动器不能有效的将扶梯制停时,扶梯将会产生逆转而导致溜车,从而造成对乘客的伤害。正如下所述:
2010年12月14日,深圳地铁国贸站的一台自动扶梯由于固定主机的螺栓断裂,致使主机移位而导致驱动链脱落,上行过程中的梯级反向下滑造成十几人在自动扶梯的下入口处踩踏致使3人受伤。由于驱动链的脱离使主制动器失去了对梯级的动力控制,在此情况下,附加制动器的动作是否可靠对事故后果将起到决定性的作用,此事故正是由于附加制动器没能有效作用,从而造成了事故的发生。
另一点,某年某特种设备检测院在现场监督检验中发现,公共交通型自动扶梯附加制动器有载制停一项不合格率较高,一次性通过率较低,需要制造单位作相应调整或整改才能符合要求。所以,对此次公共交通型扶梯附加制动器的失效原因进行案例分析,以引起制造、安装、维保单位的重视,加强对附加制动器的设计改进、安装及维修调整,确保附加制动器的可靠性。
众所周知,至目前为止,电梯拥有量已达1100万台之众。此外,自动扶梯和自动人行道在公共交通领域中,其拥有量占电梯拥有量近一半的比重。由此,发生在我国国内扶梯危及乘客的身体损伤或生命的安全事故时有发生。且所述案例及此类安全隐患不在个别。至于,在安全管理及维保方面情况,此处不再逐一赘述。
二、方案地抉择
自动扶梯上可编程电子安全功能控制器具备其超速、逆转、梯级缺失保护装置等,其为符合安全标准GB16899-2011及GB/T20438中规定的SIL2等级的功能安全装置;具备扶手带欠速保护及抱闸释放监控装置,符合其标准中规定SIL1等级的功能安全装置。其系统配置的安全功能:
1. 超速1.2倍保护:监控扶梯速度超过名义速度1.2倍时,断开1.2倍安全继电器,以切断扶梯的工作制动器、安全回路及控制电路的电源,使其立即停止运行。
2. 超速1.4倍保护:监控扶梯在速度超过名义速度1.4倍时,同时断开1.2倍安全继电器和1.4倍安全继电器,以切断扶梯的工作制动器、附加制动器、安全回路及控制电路的电源,使其立即停止运行。
3. 逆转保护:监控扶梯或倾斜式人行道(α≥ 6°)在其运行方向与规定的运行方向不相符合时,断开1.2倍安全继电器和1.4倍安全继电器,以切断扶梯的工作制动器、附加制动器、安全回路及控制电路的电源,使其立即停止运行。
4. 梯级缺失保护:在扶梯驱动站或转向站安装检测梯级缺失的检测装置,一旦检测到有梯级缺失,断开1.2倍安全继电器,以切断扶梯的工作制动器、附加制动器、安全回路及控制电路的电源,使扶梯在缺口(由梯级缺失而导致的)从梳齿板位置出现之前停止。(检修状态时此功能无效)
5. 扶手带欠速保护:监控扶梯的扶手带速度,在其速度低于梯级速度的15%名义速度时,断开1.2倍安全继电器,以切断扶梯的工作制动器、安全回路及控制电路的电源,使其立即停止运行。(检修状态时此功能无效)
6. 抱闸释放监控:扶梯启动后,制动系统未释放,扶梯无法启动;监控扶梯运行时,在其抱闸指令与抱闸反馈逻辑不一致时,断开1.2倍安全继电器,以切断扶梯的工作制动器、安全回路及控制电路的电源,使其立即停止运行。(检修状态时此功能无效)
7. 制停距离检测:
如果制停距离超过所规定最大值的1.2倍,立即停车,在故障锁定被复位之后才能重新启动。检修人员在故障复位前应对制动系统进行检查、采取纠正与预防措施。
为满足以上要求,需要有能够监控扶梯速度及运行方向、扶手带速度、梯级缺失、制动距离、抱闸释放状态的传感器子系统;判断上述安全功能,如计算扶梯运行速度及判断指令方向和运行方向是否一致的逻辑判断子系统;能够使扶梯在故障情况下停止并保持在安全状态下的输出子系统。因此将安全系统分成传感器、逻辑和执行器共三个子系统,以满足安全标准的功能要求。此类系统的关键点在于确保其功能可靠地执行,但问题并非完善及解决,仅停留在标准的要求上。
既有这么多的问题与隐患,又有上面提及的安全保障措施。为什么企业工程技术人员不采取措施或想办法来加以预防或执行呢?。那么,这个回答是肯定的。不仅在政府层面上,不断修改与完善相关标准及要求;加强安全宣传与监督检测。而且,对于企业工程技术人员依据相关技术进步,不断升级或加强安全防护与自我检测等措施。如强化扶梯加装可编程电子安全保护系统(即PE系统)安全运行装置及附件制动器功能检测等。因此,我们如何能更好地落实其安全技术配套设计与安全监控管理工作,为确保乘客的运行安全,特提出其具体症结及问题所在。
1. 因扶梯正常运行制停减速度控制在0.2-1.0gn之间,且实质上只能在空载运行下测试及确认,有时其减速度预留过大。则在实际运行过程因故突然停梯时,制停减速度过大,易造成乘客跌倒受伤的事件发生。
2. 现大多数扶梯的附加制动器设置的位置都比较隐蔽,不方便维保。而且部份厂家采用的附加制动器在扶梯运行和停止时又不参与动作。所以,附加制动器在扶梯维保过程中常常易被疏忽而没有进行保养。
3. 另一方面许多电梯维保人员对附加制动器的工作原理和维保方法不甚了解,没能掌握正确的技能,使附加制动器无法维保到位。
4. 如在某次现场监督检验中,发现一批次公共交通型扶梯附加制动器有载制停一项不合格率较高,一次性通过率较低,需要制造单位作相应调整或整改才能符合要求。显然,其可靠度太低,不符合安全要求。
5. 有些扶梯制造单位,对其附加制动器有载制停仅停留在型式试验阶段,而不做安装后的功能检验。还有一些单位交梯时,做完一次功能检验后,此后也不做其可靠性测试及相应维保,而埋下不能有效制停的安全隐患。
6. 此外,目前国家标准对于电子安全功能控制器具备的超速1.4倍保护与制停距离检测项目,只有检测等装置,而没有展开验收后现场附件制动器如何进行定期的功能检验等规定。且其制停距离也没有规定具体数值,仅作出其减速度要求。
综上所述,扶梯的现场运行中无论是工作制动器,还是附件制动器存在诸多工作状况及本身设计或制造存在的不足,我们应依据当前物联网技术、AI技术及5G(或地基增强型北斗系统)通讯等先进的实用性技术,着力解决上述多项技术问题与现实中的应用痛点。除了针对我国国情,在技术、监管及检测标准方面逐步完善与修订外,我们务必且加快采取如下办法或措施来综合解决上述各种问题。
三、结构与原理
GB16899-2011自动扶梯和自动人行道标准规定了设置工作制动器与附加制动器的条件与要求,其条件与要求摘录如下:
5.4.2 制动器
5.4.2.1 工作制动器
5.4.1.1.1 通则
5.4.2.1.1.1 自动扶梯和自动人行道应设置一个制动系统,该制动系统使自动扶梯和自动人行道有一个接近匀减速的制停过程直至停机,并使其保持停止状态(工作制动),见5.12.1.2.4.制动系统在使用过程中应无故意延迟,
如果制停距离超过5.4.2.1.3.2和5.4.2.1.3.4所规定最大的1.2倍,自动扶梯和自动人行道应在故障锁定被复位之后才能重新启动(见表6的0)。如果有必要,在手动复位前应对制动系统进行检查、采取纠正措施(见7.4.1e)。
自动扶梯和自动人行道启动后,应有一个装置(见表6的1)检查制动系统的释放。
5.4.2.1.1.2 制动系统在下列情况下应能自动工作:
a) 动力电源失电;
b) 控制电路失电。
5.4.2.2 附加制动器
5.4.2.2.1 在下列任何一种情况下,自动扶梯和倾斜式自动人行道应设置一个或多个附加制动器:
a) 工作制动器(见5.4.2.1)与梯级、踏板或胶带驱动装置之间不是用轴、齿轮、多排链条或多根单排链条连接的;
b) 工作制动器不是符合5.4.2.1.2规定的机—电式制动器;
c) 提升高度h13大于6m(见H.2)
附加制动器与梯级、踏板或胶带驱动装置之间应用轴、齿轮、多排链条或多根单排链条连接。不允许采用摩擦传动元件(例如:离合器)构成的连接。
5.4.2.2.2 附加制动器应能使具有制动载荷向下运行的自动扶梯和自动人行道有效地减速停止,并使其保持静止状态。减速度不应超过1m/s²。
附加制动器动作时,不必保证对工作制动器所要求的制停距离(见5.4.2.1.3)。
5.4.2.2.3 附加制动器应为机械式的(利用摩擦原理)。
5.4.2.2.4 附加制动器在下列任何一种情况下都应起作用:
a) 在速度超过名义速度1.4倍之前;
b) 在梯级、踏板或胶带改变其规定运行方向时。
附加制动器在动作开始时应强制地切断控制电路。
5.4.2.2.5 如果电源发生故障或安全回路失电,允许附加制动器和工作制动器同时动作,此时制停条件应符合5.4.2.1.3.2和5.4.2.1.3.4的规定。否则,附加制动器和工作制动器只允许在5.4.2.2.4规定的情况下同步动作。
由上摘录可知,本发明将依据所述扶梯制动器运行机理及整机相关安全隐患,结合其可编程电子安全系统的要求,利用物联网技术、AI技术及5G通信等新技术,着力和落实解决上述提及的制动器可靠度及诸多安全监管问题。
总体方案在现自动扶梯整机架构下,扶梯内部(机房回转侧)装设一安全系统自动检测和监控装置。它既替代可编程电子安全系统监测功能,又具备制动器定期自动测试功能;而运行与测试控制以物联网分布式布置,在5G或北斗系统通讯方式进行自动数字化系统操作。此外,在运行系统设备终端上以智能技术嵌入式平台展开交互式管理与监控。显然,扶梯在运营中制动距离自动检测和安全运行监控系统的设置为本发明的中心思想及要点。
下示图1为自动扶梯与之配套的扶梯安全系统监测和控制示意图。它主要由自动扶梯总成、网联安全监测系统控制器6、编码器7及虚拟主机等组成;而控制器6主要有智能传感器、电路板(含芯片操作系统)及软件等构成。其编码器7装设在主驱动4主轴上。
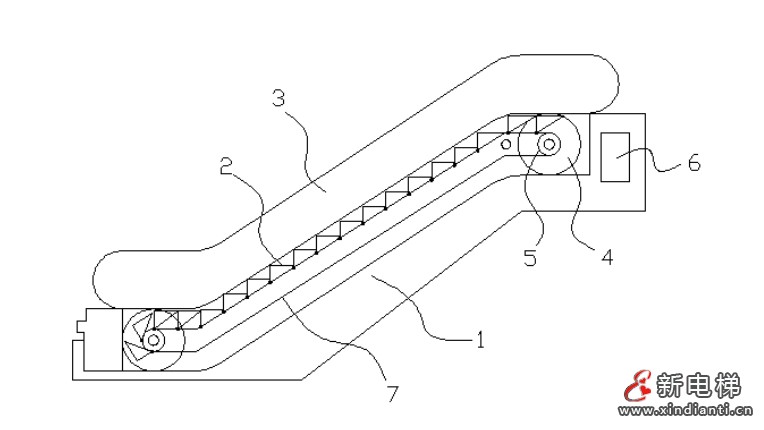
图1 扶梯安全系统监测和控制示意图
根据上述配置及网联控制器6功能要求,其扶梯安全系统监测和控制运作机理描述如下:
方案一:
1. 扶梯超速1.2倍的保护:即将工作制动器的制动距离及其近似匀减速度等数值均通过编码器7及控制器6操作系统进入虚拟主机存储与对比。在工作制动器的制动过程中,当与虚拟主机存储的数字模型进行对比,当识别系统显示为非正常,则操作系统下达停梯指令;或给整机发出维修指令及信息;或显示扶梯停止运行待修。
2. 工作制动器的制动距离依据标准,即自动扶梯或自动人行道制动载荷确定表中数据,在整机功能检验时,建立其数字模型(数据),并存入虚拟主机。而将其制动过程中匀减速度数值确定在0.6~0.8gn之间,一并建立其数字模型,存入虚拟主机。同时,在此状态下再做空载下行自动模拟测试方法;并将其数据建立其数字模型,一道存入虚拟主机,作为此后动作比较标准值。
3. 当工作制动器制动距离及减速度数值,建立其自动模拟测试的数字模型后,写入定期整机功能自动测试的日期,并存入虚拟主机。其定期自动模拟测试的时间根据扶梯使用状况而定。一般纳入24小时或半月与年度等保养时间。当每次自动模拟测试时,识别系统显示为非正常,则操作系统下达停梯指令;或给整机发出维修指令及信息;或显示扶梯停止运行待修。另每次自动模拟测试时,建议维保人员在场安排自测试与维修。
4. 如果工作制动器制停在制动载荷确定表中条件,当减速度超过所规定最大值(0.8gn)的1.2倍时,应立即停车,在故障锁定被复位之后才能重新启动。检修人员在故障复位前应对其制动系统进行检查及维修,并采取纠正措施。
方案二:
1. 超速1.4倍保护:即将附加制动器的制动距离及其近似匀减速度等数值均通过编码器7及控制器6操作系统进入虚拟主机存储与对比。在附加制动器的制动过程中,当与虚拟主机存储的数字模型进行对比,当识别系统显示为非正常,则操作系统下达给整机停梯指令;或给整机发出维修指令及信息;或显示扶梯停止运行待修。
2. 附加制动器的制动距离依据标准,即自动扶梯或自动人行道制动载荷确定表中数据,在整机功能检验时,建立其数字模型(数据),并存入虚拟主机。而将其制动过程中匀减速度数值确定在0.6~0.8gn之间。并建立其数字模型,存入虚拟主机。同时,在此状态下再做空载下行自动模拟测试方法;并将其数据建立其数字模型,一道存入虚拟主机,作为此后动作比较标准值。
3. 当附加制动器制动距离及减速度数值,建立其自动模拟测试的数字模型后,写入定期整机功能自动测试的日期,并存入虚拟主机。其定期自动模拟测试的时间根据扶梯使用状况而定。一般纳入半月或年度等保养时间。当每次自动模拟测试时,识别系统显示为非正常,则操作系统下达停梯指令;或给整机发出维修指令及信息;或显示扶梯停止运行待修。另每次自动模拟测试时,建议维保人员在场安排自测试与维修。
4. 如果附加制动器制停在制动载荷确定表中条件,当减速度超过所规定最大值(0.8gn)的1.2倍,应立即停车,在故障锁定被复位之后才能重新启动。检修人员在故障复位前应对其制动系统进行检查及维修,并采取纠正预防措施。
方案三:
1. 对于扶梯上述电子安全功能控制器中逆转保护、梯级缺失保护、扶手带欠速保护及抱闸释放监控等功能,通过其自身电子器件和编码器7等电性连接,与控制器6操作系统一并进入虚拟主机存储与对比。在扶梯运营过程中,与虚拟主机存储的各类数据进行对比,当识别系统显示为非正常时,则操作系统下达停梯指令;或给整机发出维修指令及信息;或显示扶梯停止运行待修等警示操作。
2. 除了上述四项功能外,还可将扶梯其它类似安全方面功能纳入本发明系统中一并监控。如本公司申报的《一种自动扶梯和自动人行道安全运行监控装置和监控方法》要求和内容及操作方法应无缝接入本安全监控系统平台。
方案四:
利用北斗陆基增强型系统对梯级运行时与编码器7等,展开对其水平段或倾斜段扫描定位及相关数据的录入及存储;并定期自动完成空载下行减速度监测程序。即在某一没有乘客乘梯的时段,启动进入工作制动器与附加制动器自动测试功能,使扶梯进入正常运行状态,分两种方式测试空载下行加速度数值是否符合规定值(0.6~0.8gn),并确认。如不符合,则扶梯进入待检修状态。并以文字方式指示;若符合,存储数据并转入正常运行。且进入定期功能自动检测程序。若对比存储数据为不符合时,则操作系统下达停梯指令;或给整机发出维修指令及信息;或显示扶梯停止运行待修。
上述方案四说明两点:一是分两种方式测试是指工作制动器单独制动测试其减速度;另指工作制动器与附加制动器同时制动测试其减速度。二是被测试的各加速度值应是不同的。正常停梯,加速度值应偏小;当人被夹或已倒下,应紧急停梯,其加速度值应偏大。
方案五:
上述方案一至方案四运营程序与方法,纳入自动扶梯和自动人行道网联安全自动监控和检测系统控制器。其思路与配置详见图2所示。即可通过扶梯本发明输出端及接口,接入电梯远程安全生态监控系统平台或第三方电梯检验检测系统平台上。
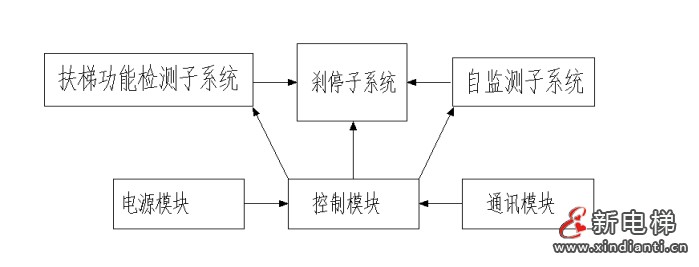
图2 扶梯控制器网络图
本发明专利包含执行上述自动扶梯和自动人行道网联安全监测控制器6时,扶梯等相关安全部件的使用、检验检测及监管过程中运行的软件程序。另说明一点,本发明运营程序等主要利用当今5G(或地基增强型北斗系统)通讯技术和人工智能技术,使自动扶梯和自动人行道成为集群分布式物联网交互运行及远程安全生态平台监管。
四、要点与总结
综上可知,本发明在于进一步完善了自动扶梯和自动人行道的功能及作用;另一方面以人工智能的方法,解决与确保乘客等人员在乘梯过程中不同工况下,防止或化解人身安全事故及设备损伤等事件地发生。同时,将电梯维保人员、监管人员及第三方检验人员工作量大大降低,从而使棘手问题变得轻而易举。
因此,本发明不仅大大地提升了自动扶梯和自动人行道运行地可靠性,从而其乘客乘梯安全风险大大降低。又因本发明通过5G等通讯软件自动联入电梯物联网远程监控终端。这样,既方便各级管理人员监管,又能第一时间得到救援人员或维修人员的响应及处理。而关键一点在于当扶梯安全问题得到智能化处理或解决时,网联进入电梯远程监控安全管理生态平台将成为必然。只有这样,才能确保我国自动扶梯等安全事故率至少下降九成。尽管企业技术与管理成本有所增加,但社会管理成本显著下降,使社会效益大幅度提高,而国民生活幸福指数也同步提升。
五、产品专利说明
本产品于2021年12月向国家专利局提出申请,现已获得国家发明专利证书。其专利号为:202210163317.1。
和众电梯系统技术研究团队
2024年12月8日整理于佛山