曳引电动机与编码器相角补偿
曳引电动机与正余弦编码器的相角补偿调整也称之为编码器定位,定位的方法如下:
编码器定位:防止飞车
编码器定位必须在曳引钢丝绳脱开后进行
编码器定位
RUN SOURCE设定为“0”,驱动部分进入手动状态。
使接触器UD,UDX与抱闸接触器LB保持吸合状态,
确认驱动部分无故障后,进入M4-3-2TUNE菜单,
根据提示完成主机编码器自定位功。
(定位时,主机应缓缓转动)
大约30s~60s,然后服务器提示“Tune is Finished”,表示定位完成。
定位后的确认
主机定位完毕,在UD,UDX接触器,LB继电器保持吸合的状态下,
通过SVT进入MINITOR=1下的任一监视画面,按ENTER启动电机运行,
按CLEAR停止电机的运行,
手动运行速度可以通过Man speed[mm/s]参数调整。
运行时观察驱动器输出电流参数,应该在1A以下,如果电流过大,请重新定位或检查接线。
手动试运行完后将RUN SOURCE设定为“1”
驱动器状态恢复为自动状态
修改电梯运行方向
所用的编码器线为V1线即左置线:如果曳引轮转动正常但转动的方向与实际井道方向正好相反(按UP钮,曳引轮的转动方向是轿厢向下运行的方向;按DOWN钮,曳引轮的转动方向是轿厢向上运行的方向),则需作以下改动:
通过M4-3-1-1设置Rotate dir=1(默认值为0)
左置:M231中Motor Setupdir和M4311中Rotate dir均设为1,
MSBA拨码开关ANSI拨为OFF
右置:M231和Motor Setupdir和M4311,Rotate dir均设为0
MSBA拨码开关ANSI拨为ON
修改电梯运行方向
如果所用的编码器线为V2线,即右置则以上设置和拨码相对于V1线均相反:
左置: M231中Motor Setupdir和M4311中Rotate dir均设为0,
MSBA拨码开关ANSI拨为ON
右置: M231和Motor Setupdir和M4311,Rotate dir均设为1
MSBA拨码开关ANSI拨为OFF
井道自学习
把机房控制柜内的检修开关拨至INS(检修)位置,并且把MSBA板左边SW2的开关的‘1’拨至“ENA”(允许写入)位置。
将服务器连上MSBA板的K11上,按M-2-4-1进入井道自学习模式
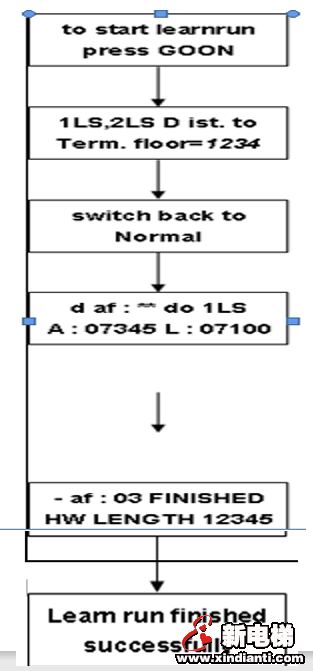
自学习结束。依次按“蓝键 ”和“ clear”键确认并保存自学习结果
如果电梯的任何井道开关的位置改变,都必须重新做自学习运行
MOTOR SPEED”或“COUNTS PER REVOL”中的任何一个参数值更改,都必须重新作自学习运行。